Housing direction inspections
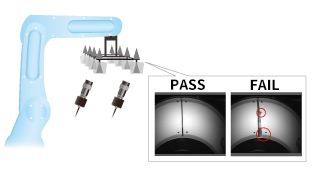
Container label inspections


Here, the labels on resin-molded cups are inspected for misalignment as a robot carries them. Due to the high speed at which the cups are moved, the cameras were installed below the cups at an angle. In spite of this angle, the sides of the cups are completely in focus from top to bottom, which makes a high-precision inspection possible.

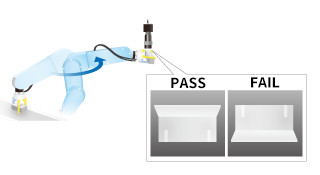
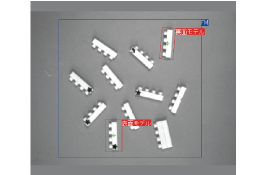
Objects of inspection are not necessarily facing the right way for the robot to pick them up. With RobotFinder, both the front and back surface can be registered and discerned, which makes inspections suitable for each application possible.
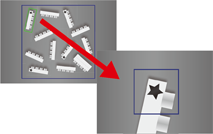
Our system searches for a unique character or symbol that can be used to distinguish between the front and back in order to precisely discern whether to pick up an object.

The same object can be detected multiple times with one search, and the coordinates of each detected object can be output via serial or network communication.
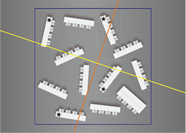
For image processing, the top left corner of the image is the origin, but robots do not necessarily use this system. Because our systems make it possible to specify different coordinate systems, coordinates suitable for robots can be output.
Coordinate system and
detection-number settings
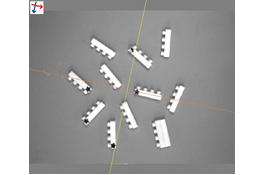
Search settings
Settings can be easily specified just by selecting check boxes for the coordinate-axis direction, rotation angle, etc. to use when outputting detected coordinates to a robot.
Search models for the front and back surface can be registered and set.
Front and back conditions, distance conditions (the feasibility of distance measurement, nearby-area checking, etc.), and nearby-area-condition thresholds can be set.
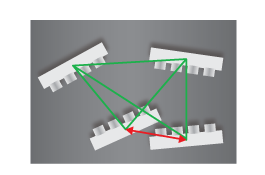
Because the distance between objects is measured, it is possible to judge cases where it is not possible for the robot to pick them up, such as when objects of inspection are overlapping or stuck to each other.
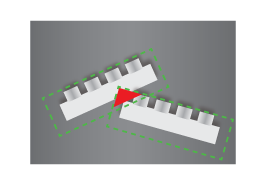
The nearby area is checked to see whether there are other objects of inspection, foreign matter, etc. in the robot's pickup area. Only objects that can be picked up are selected.
We are an expert group in the field of visual inspections and image processing inspections. We are not just a manufacturer. Instead, we are a visual inspection and image processing inspection system manufacturer that combines knowledge of and experience related to image processing algorithms, optical technology, electronics, and machinery in order to provide comprehensive consulting as a development engineering company.